상담완료 | Norine님의 문의
페이지 정보
작성자 Norine 작성일24-05-22 11:43 조회18회 댓글0건관련링크
본문
이메일 : norinemosher@yahoo.it 연락처 : 예식일 : Cracking The RS485 Standard Secret 문의내용:
This converter can handle up to 36 VDC in and provides up 5 V up to 500 mA downstream- more than enough for Starfish. The specific pumps used in the Lumen have simple 24 VDC motors so there's lots of options for switching power to them. Obviously it is not necessary to measure only the temperature, we have thought and are thinking about other things too; to date we have TXsoil for soil moisture (to be measured remotely e.g. for irrigation purposes), and for practically any type of measurement we have created TXdata RS485 ModBus - which can be connected to thousands of third party professional ModBus meters existing (and there is something for all needs: temperature and humidity meters, anemometers, voltage meters, energy, light meters, water meters, presence sensors, light sensors, soil moisture sensors, etc.; many meters professional work in standard ModBus; and not just meters; and it also supports RS232). After connecting as for point B, in the Settings it is possible to define a name for the device, and if the reading periodicity is less than 250 minutes, you can set an interval of hours in which the reading is not carried out / transmitted (for example you can disable the night).
It works in the basic version with 4 affordable AA batteries (1.5V, alkaline or Lithium; in the V5 version it can be powered at 5V instead of batteries, for example via the USB cable included) and has been expressly designed to have low or very low consumption and to use the cheapest batteries available. Under some conditions it can be used up to data transmission speeds of 64 Mbit/s. Although many applications use RS-485 signal levels, the speed, format, and protocol of the data transmission are not specified by RS-485. Perhaps the most striking aspect of this layout is the fan-out of the signal lines. Now that the schematic is laid out, I can show you the board layout. We repeat, all versions can be configured to transmit to a script on a Web server - it can be your "real" web server or a virtual web server of a home automation system (eg ControlHUB), automation home assistant; and they can use MQTT.
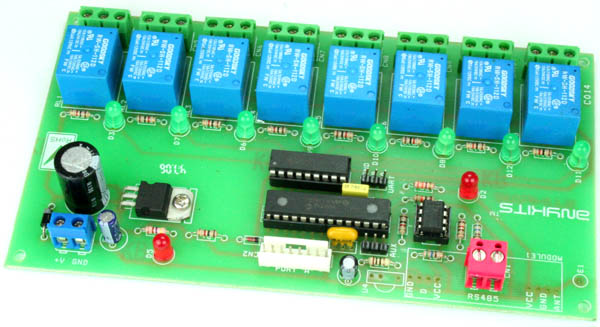
They draw less than 500 mA so I chose to use MOSFETs. I chose the RP2040 because I've been wanting to do a project with it and it's currently the easiest microcontroller to get my hands on. This article will explore the hardware design of Starfish, a control board for a pick and place machine built around the Raspberry Pi RP2040 microcontroller and Trinamic TMC2209 motor drivers. There's one motor for the X axis and two for the Y axis6. The driver's ENABLE signal is driven by one of the RP2040's GPIO pins. Because a mark (logic 1) condition is traditionally represented (e.g. in RS-232) with a negative voltage and space (logic 0) represented with a positive one, A may be considered the non-inverting signal and B as inverting. A (green, negative) is higher than B (red, RS485 standard positive). It's a wonderful open source project that aims to bring the power of these expensive industrial machines into reach for makers and small businesses. 2. Texas Instruments has an excellent Application Note about ferrites in power filters. The extra screw terminal is for daisy-chaining power to other boards. This is enough to drive a small power MOSFET. I absoutely could've used the same MOSFET circuit here.
No big surprises here. No surprises here, although I did find it unusual that the Lumen uses an IDC-style header. Since I knew that the Lumen team was working on a new motherboard revision, I figured I'd take the time to explore creating a board of my own. This eventually lead to me wanting to create my own control board for the machine. STEP and DIR are used to control the actual motor. RS-485 is used as the physical layer underlying many standard and proprietary automation protocols used to implement industrial control systems, including the most common versions of Modbus and Profibus. RS-485 standard conformant drivers provide a differential output of a minimum 1.5 V across a 54-Ω load, whereas standard conformant receivers detect a differential input down to 200 mV. Converters between RS-485 and RS-232 are available to allow a personal computer to communicate with remote devices. RS-485 signals are used in a wide range of computer and automation systems. OB2, OB1, OA1, and OA2 are the motor outputs. 3. There are so many conflicting recommendations for how to terminate the USB shield on the device side- and that's because it really depends on the situation.
댓글목록
등록된 댓글이 없습니다.